I will look at V2 some time, thanks.
As far as V1 goes here are some of the issues I had and how I resolved them, should someone wish to start to compile a trouble shooting list:
1) Even though my board has Pro Micro printed on it and is the same size and looks identical to your other boards you show, my board is detected as an Arduino Leonardo and without selecting that board the upload of the sketch failed with a memory address problem. So I had to select Arduino Leonardo and not Pro Micro in the Arduino IDE.
2) In the instructions I managed to copy the wrong file and got a type error when verify on the sketch, so if you get a type error you probably have not copied the correct file or missed some.
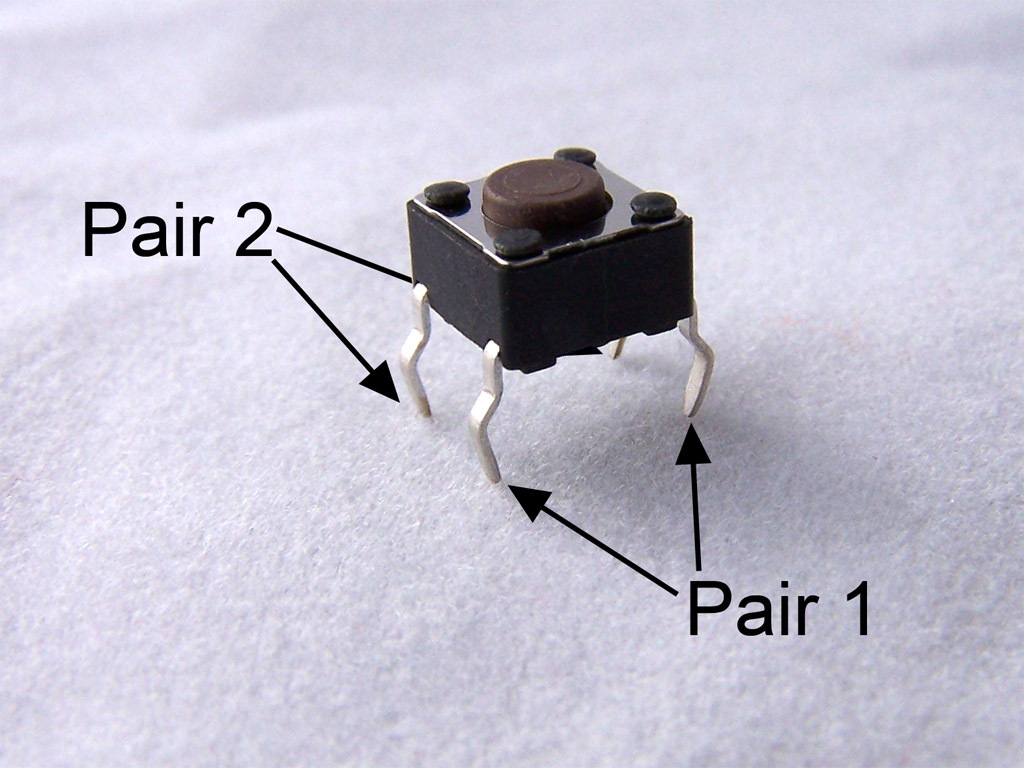
3) My push switch has four legs which means to me it is not obvious how to connect it. I did it wrong so it was always connected when not pushing the switch. This led to the device constantly recalibrating. In the end I tried it by just touching two wire together to make the switch to find out it was how I connected the switch which was wrong.
4) Once I got the device detected and operating as a windows joystick, in ED it did not seem to work after assigning to the head lock controls. In the end I realised I needed to assign a key to the head lock toggle and switch it on in game. My advice is to try head tracking with a mouse first in ED before the head tracker so you know how to set it up in ED.
I still need to get the calibration numbers to offset the drift, but I am off to the pub tonight and then there is Alpha 4, so it may have to wait a while to do that. Maybe I will be back here asking questions about that as well
")